Робот с дистанционным управлением
Робот с управлением по беспроводному каналу связи. В качестве радиомодулей используются недорогие радиомодули nrf24l01. Управляющим контроллером робота является ATmega8, программа написана на языке c.
Для перемещения робота используются два независимых друг от друга шасси.
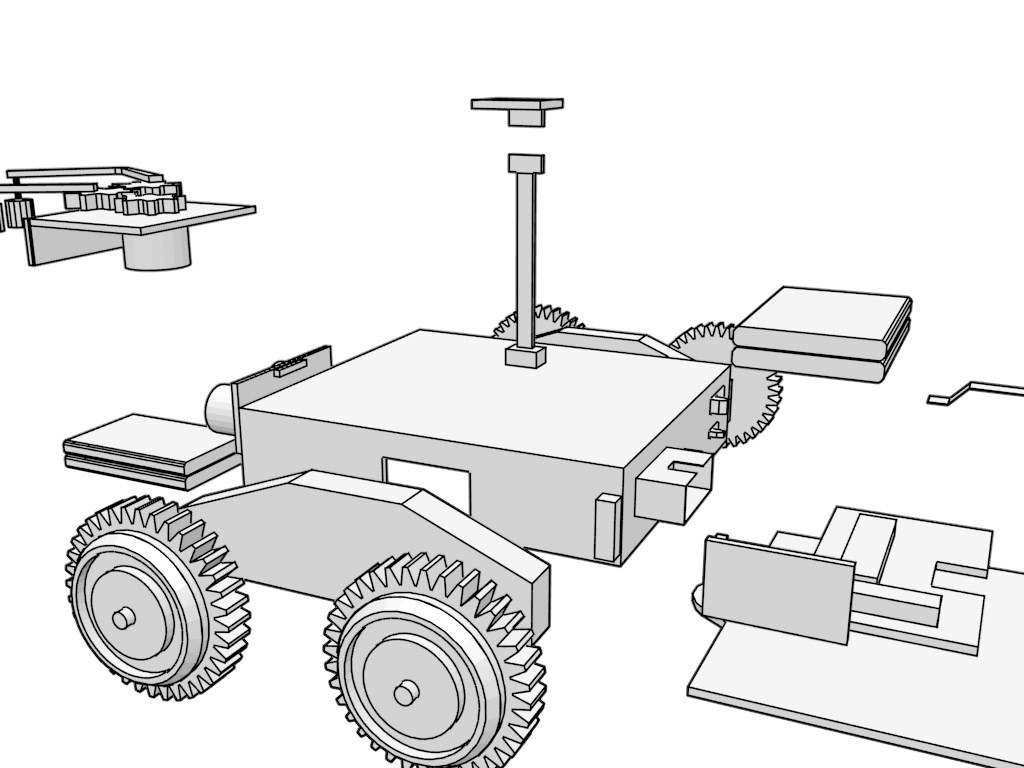
Рисунок 1 – Конструкция робота
Робот оснащён следующими датчиками:
Расстояния. С помощью датчика расстояния (дальномера) робот может находить препятствия и отправлять расстояние них пользователю. Однако основное назначение датчика - находить объекты, которые можно подобрать захватом. В качестве датчика расстояния служит ультразвуковой дальномер HC-SR04.
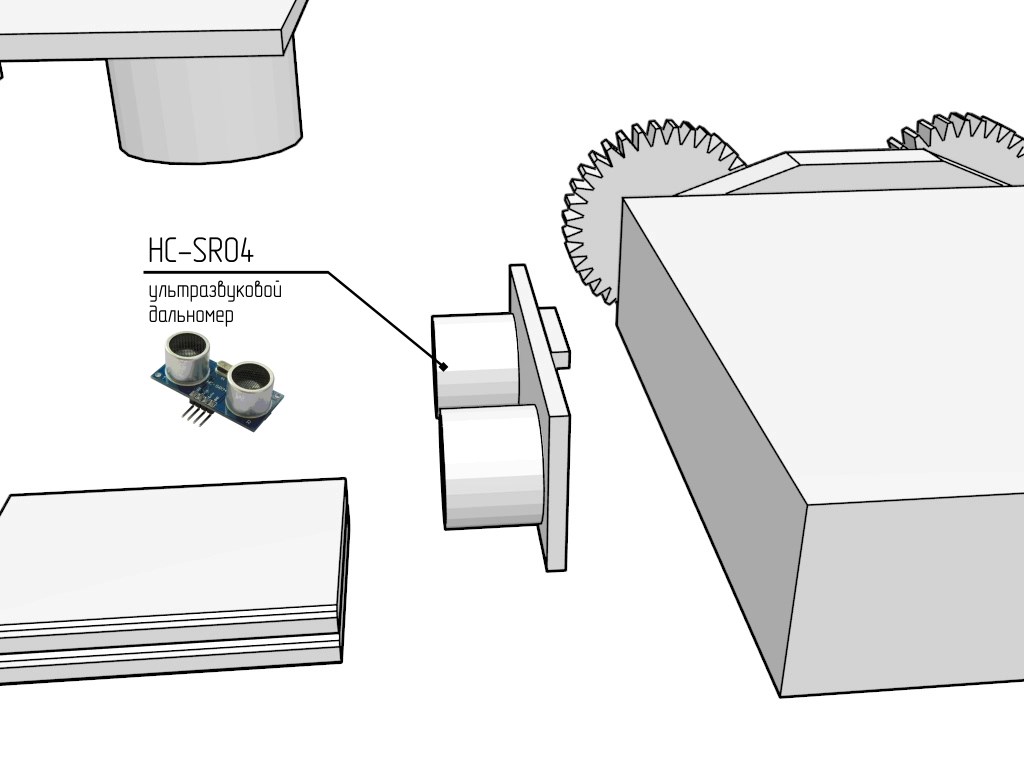
Рисунок 2 – Дальномер в тыльной части робота
Препятствия. Датчик находится непосредственно под захватом. Датчик служит для подтверждения удачного захвата объекта роботом.
Поворота (электронный компас). Наличие этого датчика добавляет роботу понятие текущего угла поворота, что важно для сканирования на предмет препятствий или объектов для захвата. Модель датчика - HMC5883L.
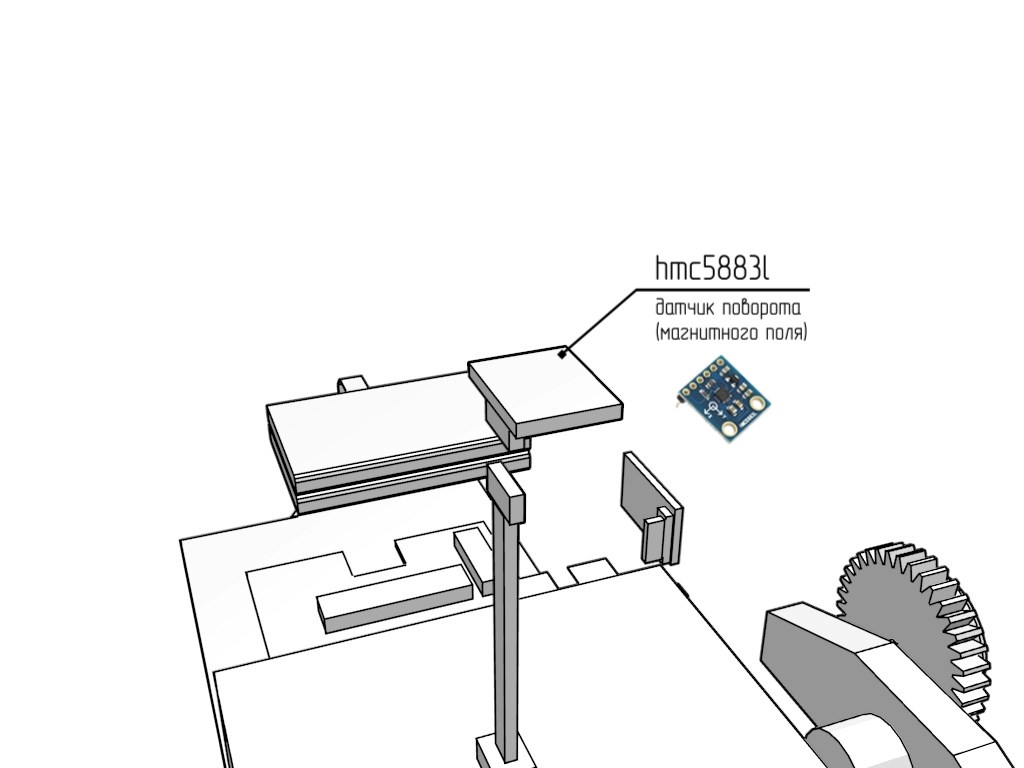
Рисунок 3 – Датчик поворота, установленный на мачте
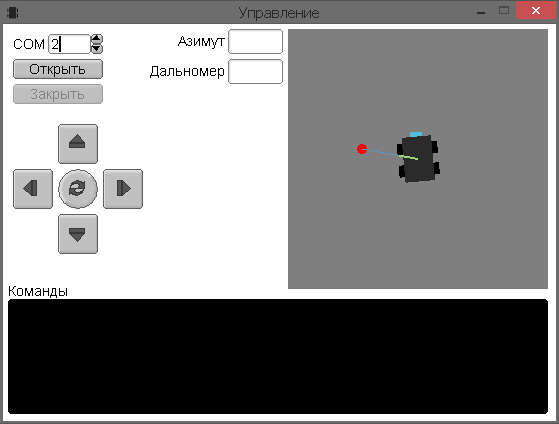
Робот также оснащён манипулятором для выполнения "полезной" работы. Управление роботом происходит с компьютера через особый модуль ([usb]->ft232->[uart]->atmega8->[SPI]->nrf24l01). Программа для визуального наблюдения за роботом написана на языке c, подключена библиотека fltk, использовались платформонезависимые функции, благодаря чему программа собирается и запускается не только на Windows.
Немного фото:

Рисунок 5 – Робот без манипулятора
Рисунок 6 – Непосредственно захват

Рисунок 7 – Робот с захватом, компас снят